Overview
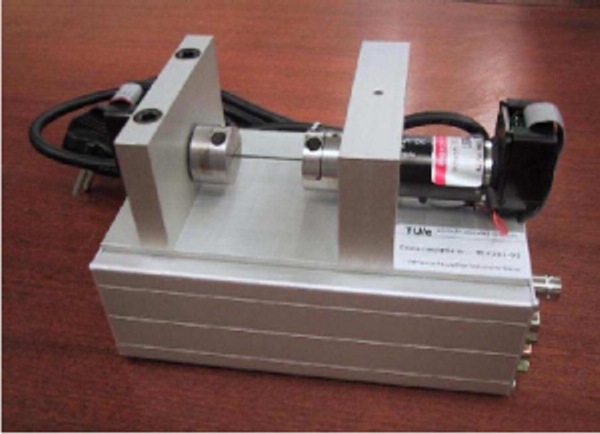
In this project, my partner and I designed and implemented a feedback and feedforward control system for a fourth-order PATO motion setup — a two-mass spring-damper system representative of the dynamics found in semiconductor lithography and high-speed printing. The primary objective was to achieve the fastest possible scanning motion over a 120-radian stroke while maintaining the lowest tracking error on the non-collocated (end-effector) side.
The project was conducted as part of the Control Engineering course at TU Eindhoven (Group 67, with Kayden Knapik) and written in IEEE conference format.
System Identification
Before designing a controller, we performed frequency-domain system identification using a 3-point measurement technique. Broadband noise was injected into the plant, and three signals were recorded simultaneously: the disturbance, the plant input, and the plant output. This allowed us to compute an accurate open-loop FRF even under closed-loop conditions.
The Frequency Response Function was estimated using Welch's method with a Hanning window and 50% overlap:
where is the cross-power spectral density between the disturbance and output, and is the cross-power spectral density between the disturbance and input.
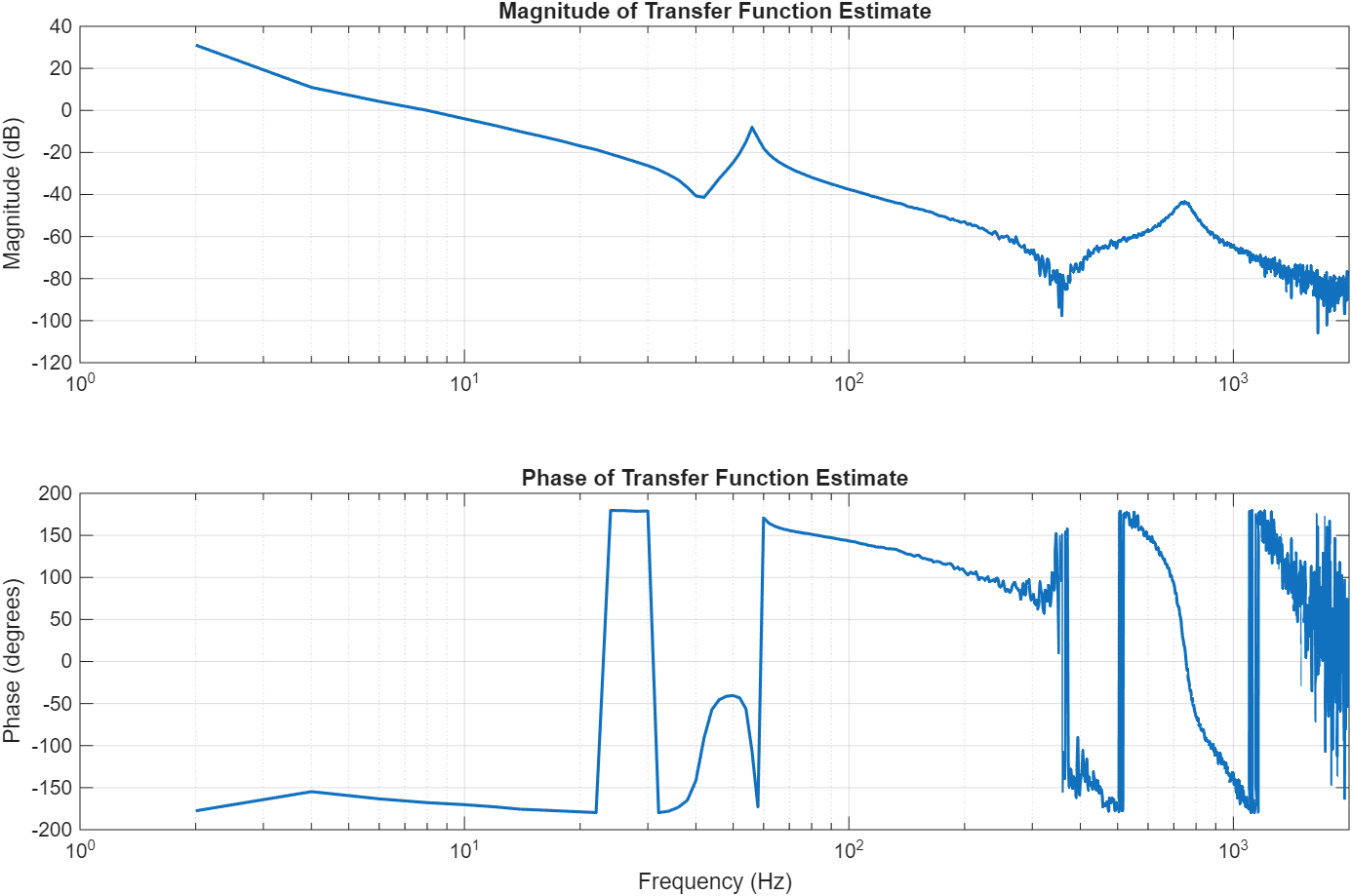
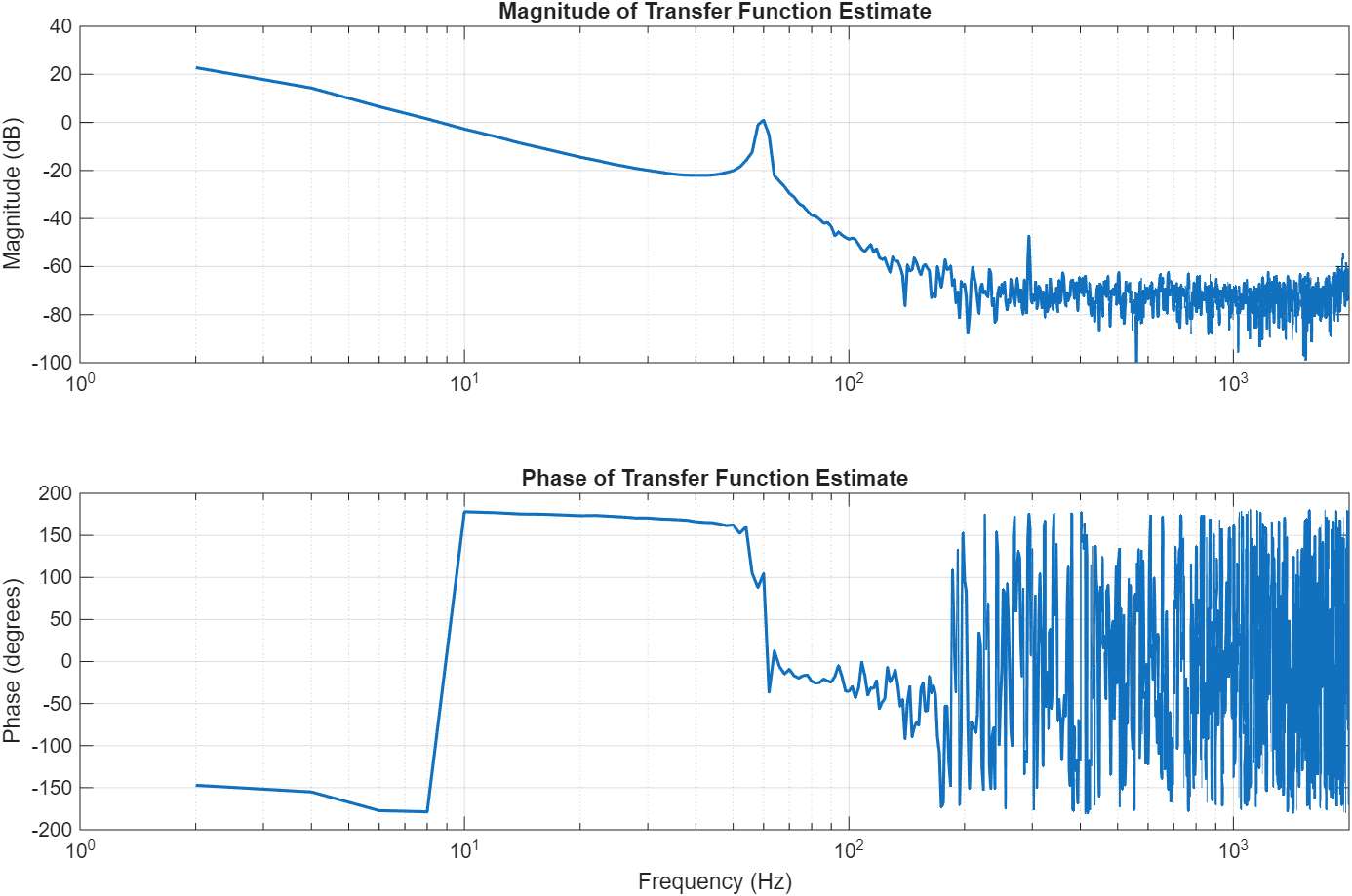
The plant exhibits two distinct transfer functions:
- Collocated (motor-side encoder): contains an anti-resonance/resonance pair
- Non-collocated (end-effector): fourth-order roll-off with resonance only
Controller Design
Feedforward
Feedforward was designed to handle the bulk of reference tracking, with three components tuned sequentially:
- Coulomb friction gain () — matched deceleration/acceleration errors
- Viscous friction gain () — minimized constant-velocity error
- Acceleration feedforward () — eliminated remaining error peaks
This reduced peak tracking error from 1.4 rad to 0.1 rad.
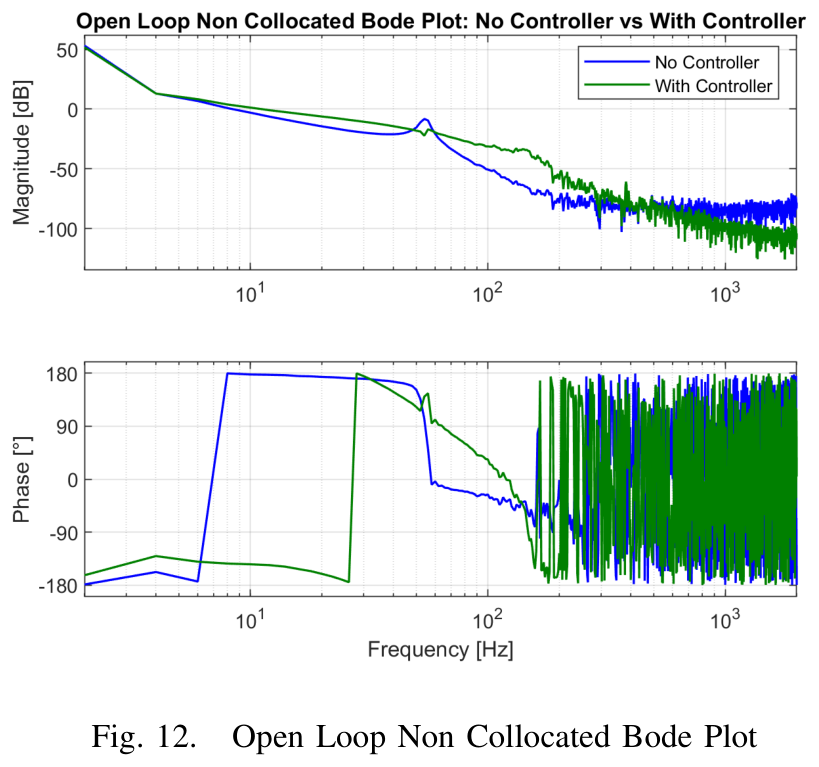
Feedback (Loop Shaping)
The feedback controller was designed using classical loop-shaping:
| Component | Parameters |
|---|---|
| Proportional Gain | 2.5 |
| Notch Filter (60 Hz) | Zero damping: 0.01, Pole damping: 0.7 |
| Notch Filter (3.45 Hz) | Zero damping: 0.1, Pole damping: 0.001 |
| Lead-Lag Filter | Zero: 14 Hz, Pole: 60 Hz |
| 2nd Order Low-Pass | Pole: 200 Hz, Damping: 0.2 |
The 60 Hz notch targeted the main resonance frequency, while the 3.45 Hz notch addressed a low-frequency mode caused by non-ideal mechanical coupling. The lead filter provided phase margin around the crossover frequency.
Results
The final controller achieved Region I performance:
- RMS Tracking Error: 2.252 mrad (requirement: < 6 mrad)
- Peak Tracking Error: 9.425 mrad (requirement: < 12 mrad)
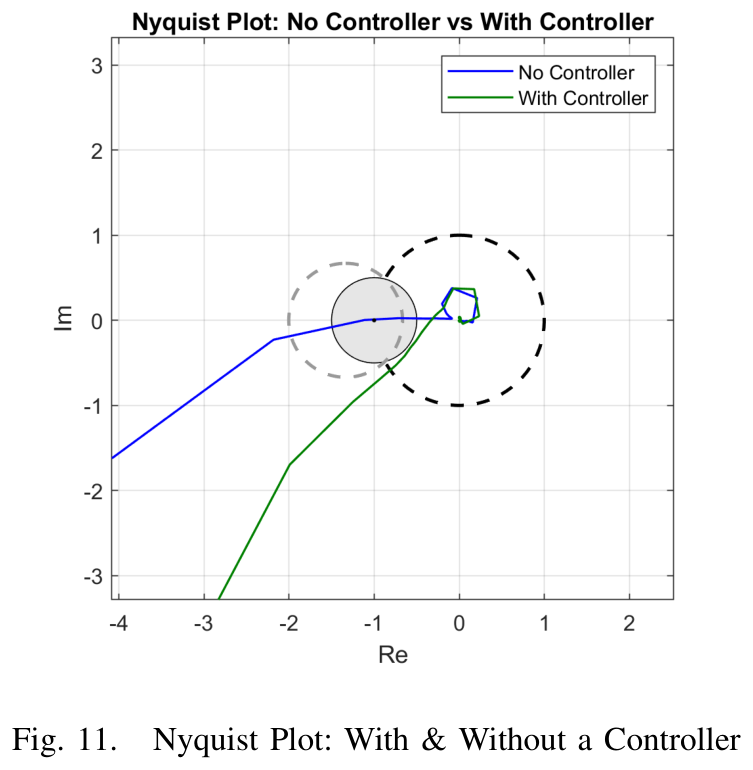
- Sensitivity margin (): below 6 dB
The system was validated on real hardware (Raspberry Pi-based real-time controller connected to the physical PATO setup), with Bode plots, Nyquist diagrams, and power spectral density analysis confirming stability and performance.
Results & Discussion
This project deepened my understanding of frequency-domain control design — from the subtleties of FRF measurement (coherence, spectral leakage) to the practical trade-offs of loop shaping (bandwidth vs. noise amplification). Tuning feedforward before feedback proved to be a powerful design philosophy that I've since applied in other projects.
Technologies Used
MATLAB, Simulink, Raspberry Pi (real-time control), physical PATO motion setup, IEEE LaTeX template