A collection of academic, personal, and research projects in control systems and robotics.
Designed, synthesized, and deployed a supervisory controller for a storm surge barrier inspired by Hvide Sande in Denmark — with a live in-browser simulation combining continuous ODE integration and a discrete supervisory FSM.
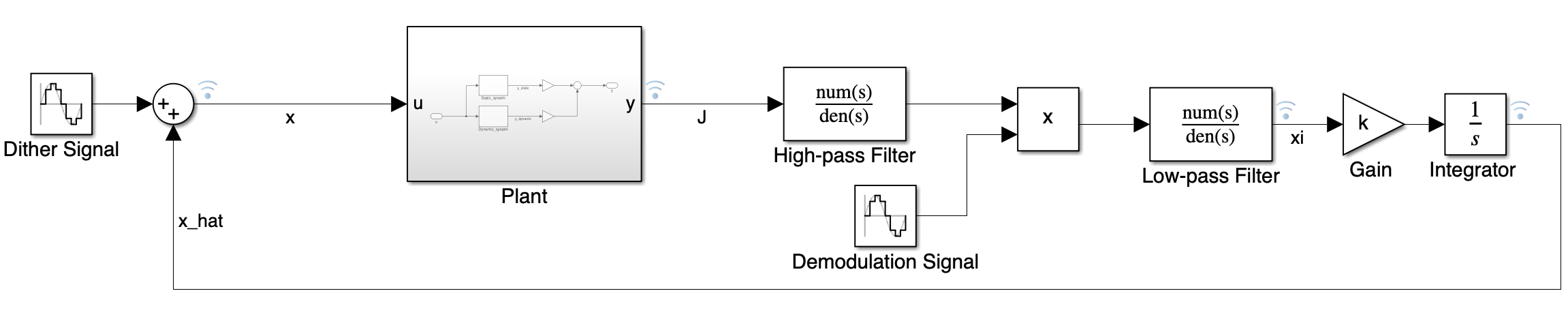
Designed, simulated, and experimentally validated three extremum-seeking control (ESC) approaches — classical, moving average, and sampled-data — on a fourth-order compliant stage to find the sub-rad light-intensity optimum. Part of 4CM120 at TU/e.
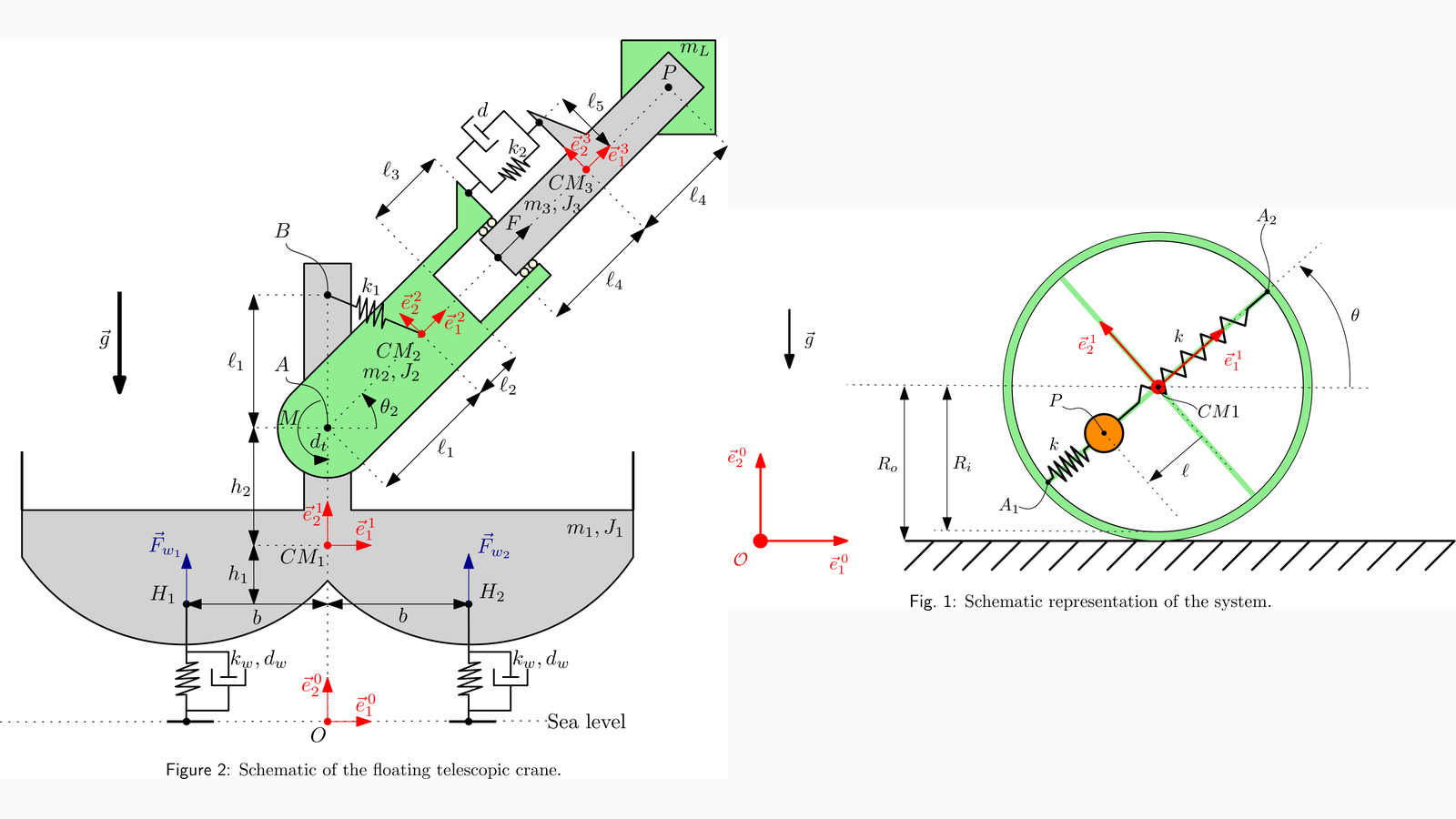
Two take-home assignments for TU/e's 4DM10 course: derived and simulated a DAE model of a floating telescopic crane, then analyzed a passivity-based energy-tracking controller for an oscillating mass on a rolling ring and a Lyapunov stability analysis of a COVID-25 SIR epidemic model.
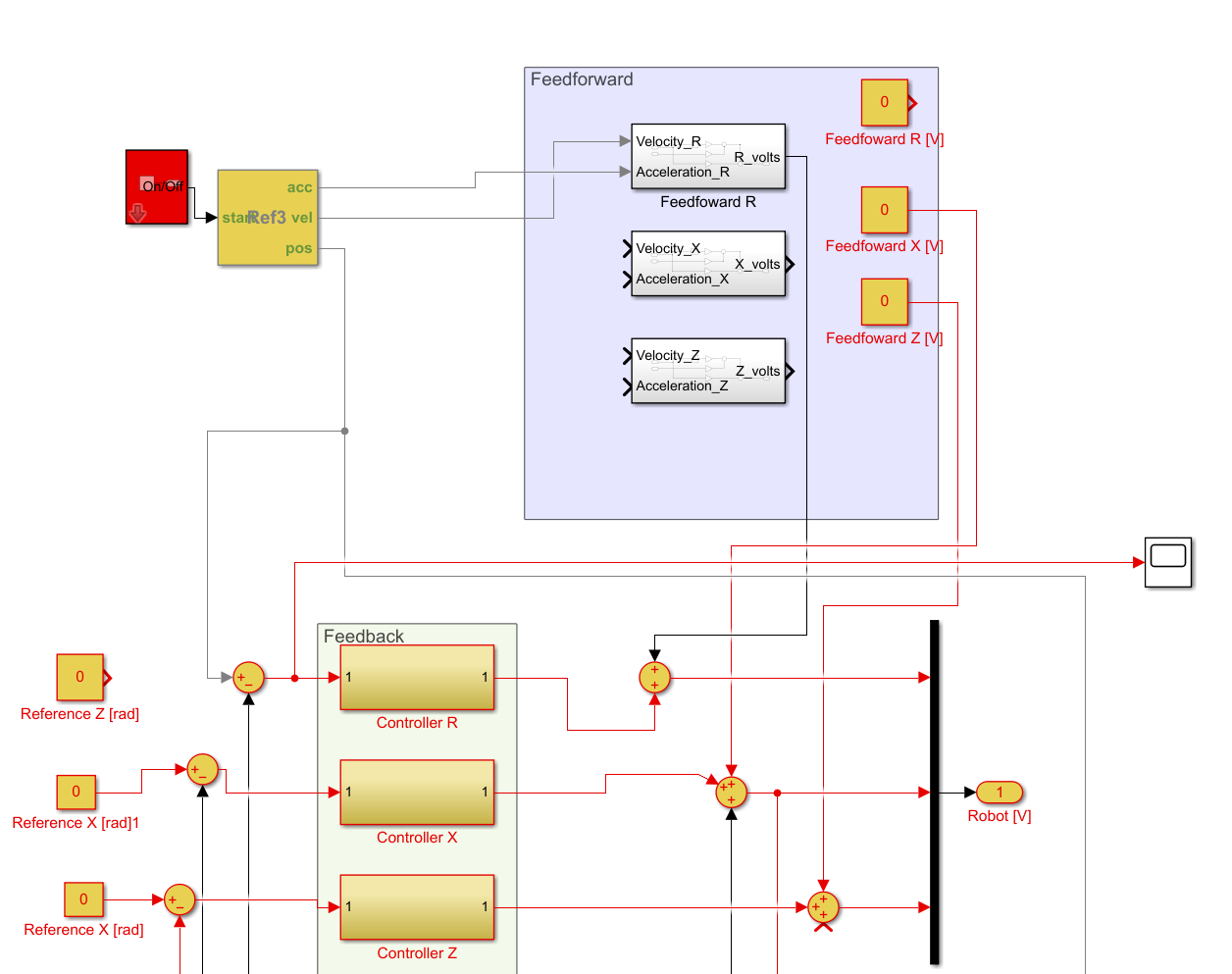
Designed a high-performance motion controller for a fourth-order PATO setup, achieving sub-millirad tracking errors through system identification, loop shaping, and feedforward tuning.
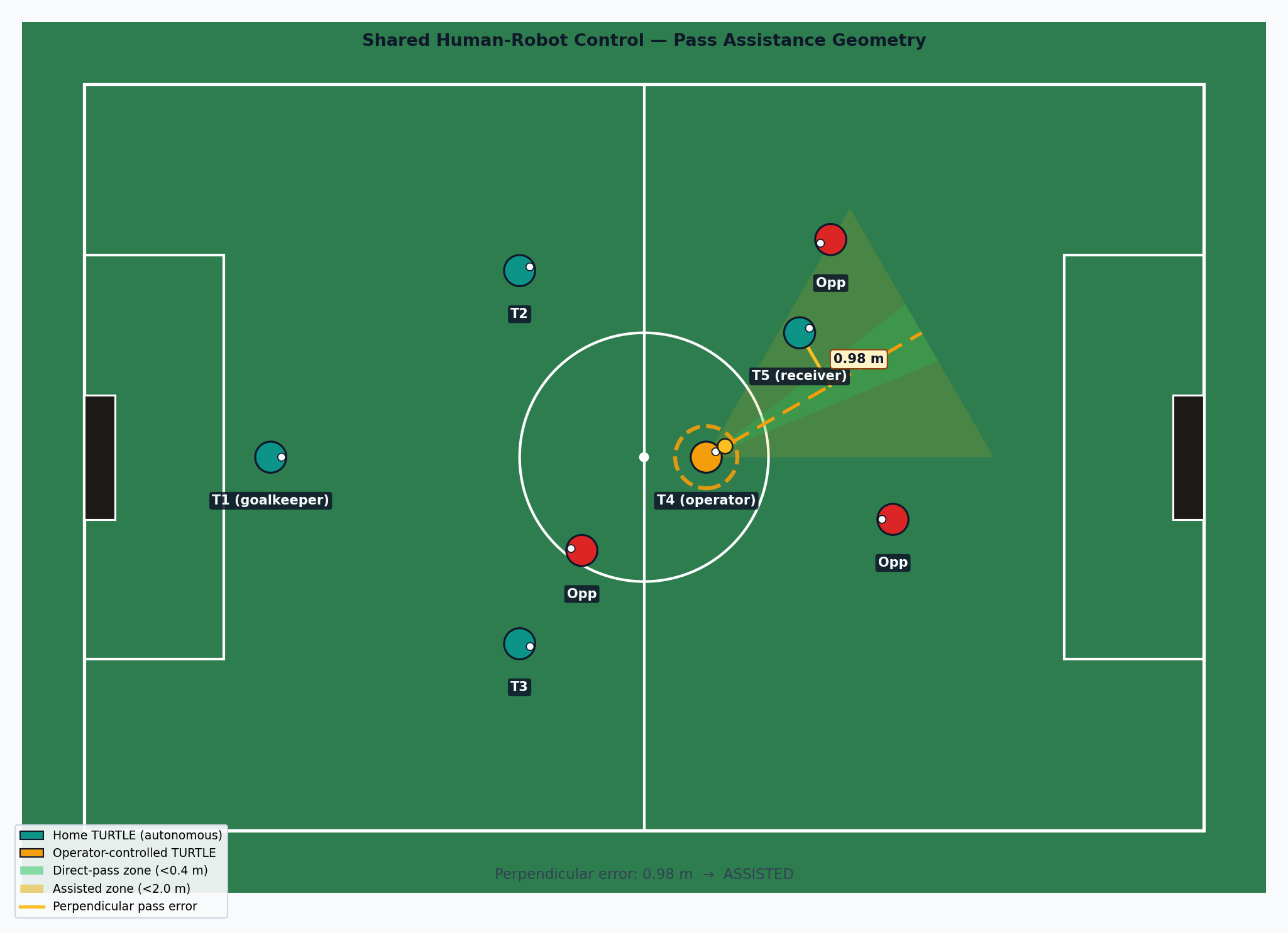
BSc thesis project: designed and implemented a shared human-robot control framework for Tech United's autonomous soccer robots, enabling one operator to control up to 5 robots simultaneously.
Built a multi-robot autonomous system that navigates an arena, captures images wirelessly, and identifies historical figures using facial recognition.
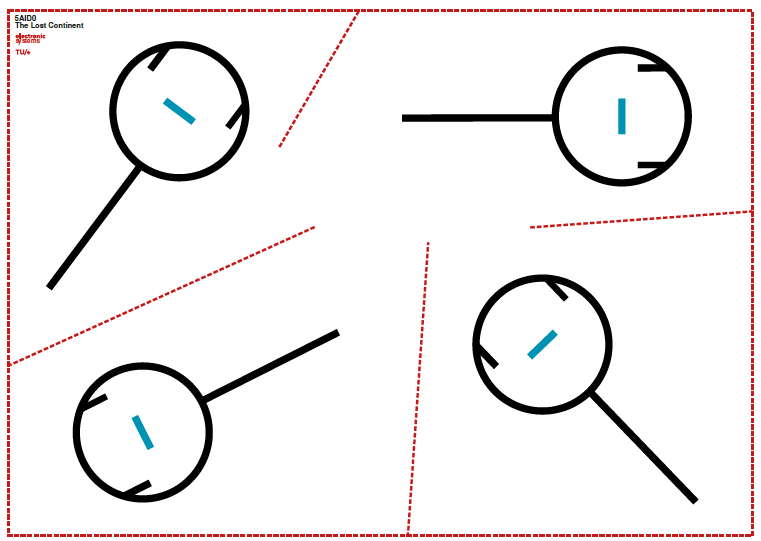
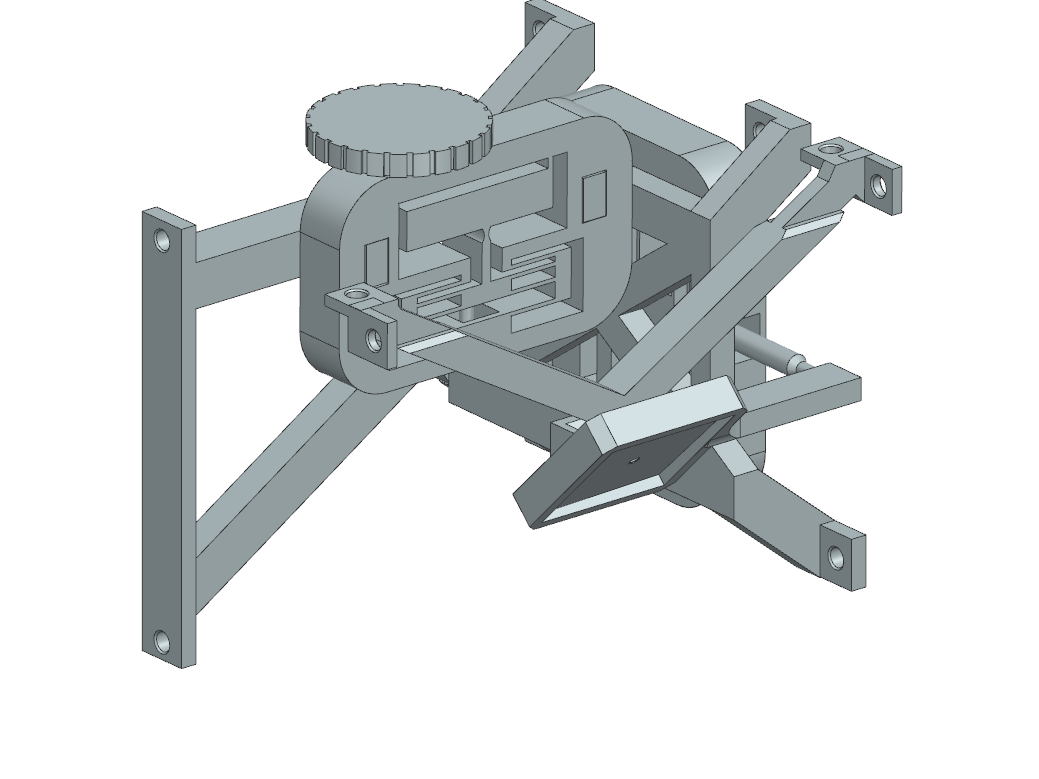
Designed and prototyped a precision kinematic mirror mount using custom flexure mechanisms for a LASER communication satellite application.
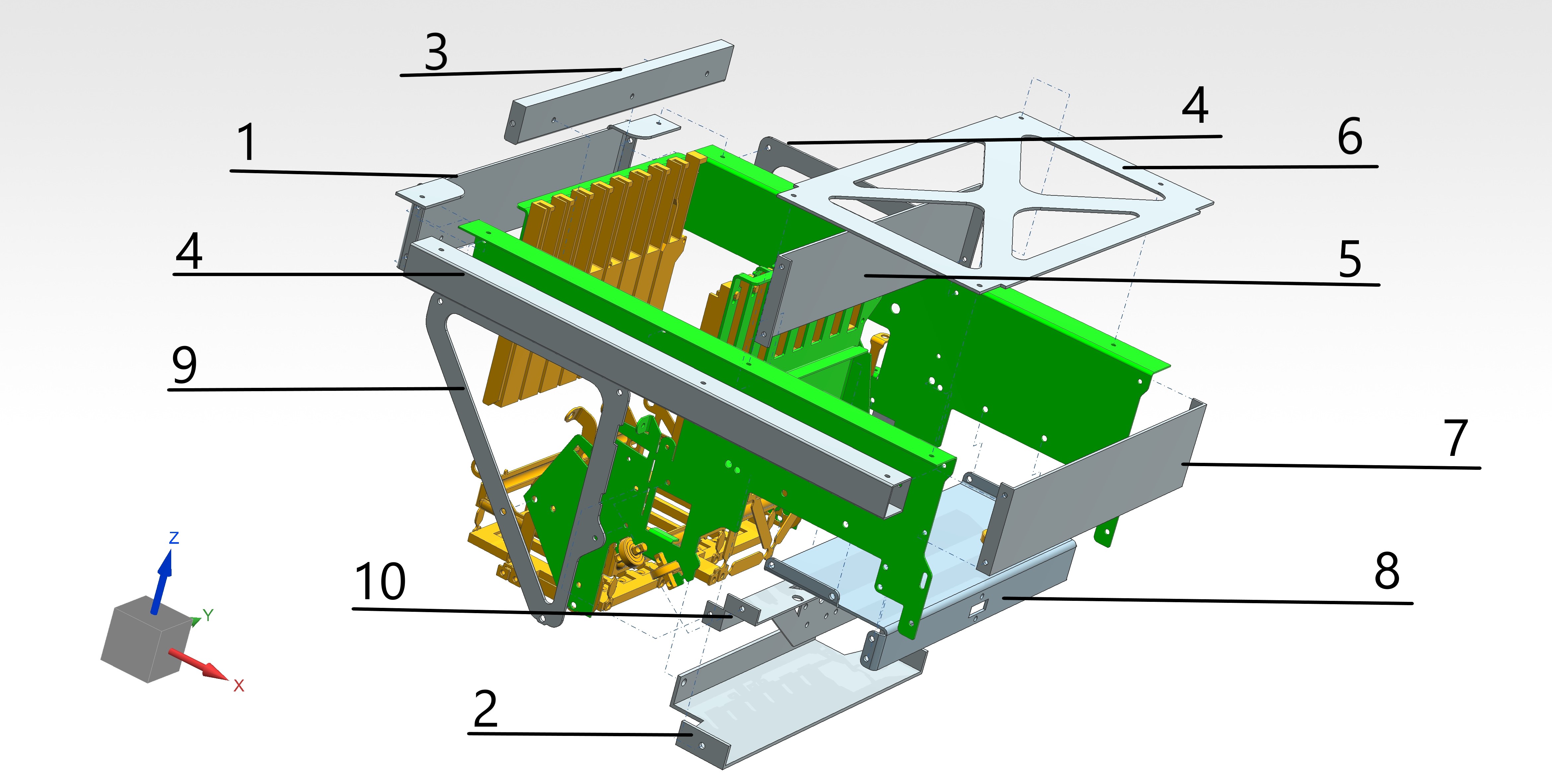
Redesigned a Canon COLORADO 1650 printer carriage using FEA to shift all eigenfrequencies above 50 Hz, eliminating resonance with machine vibration sources.
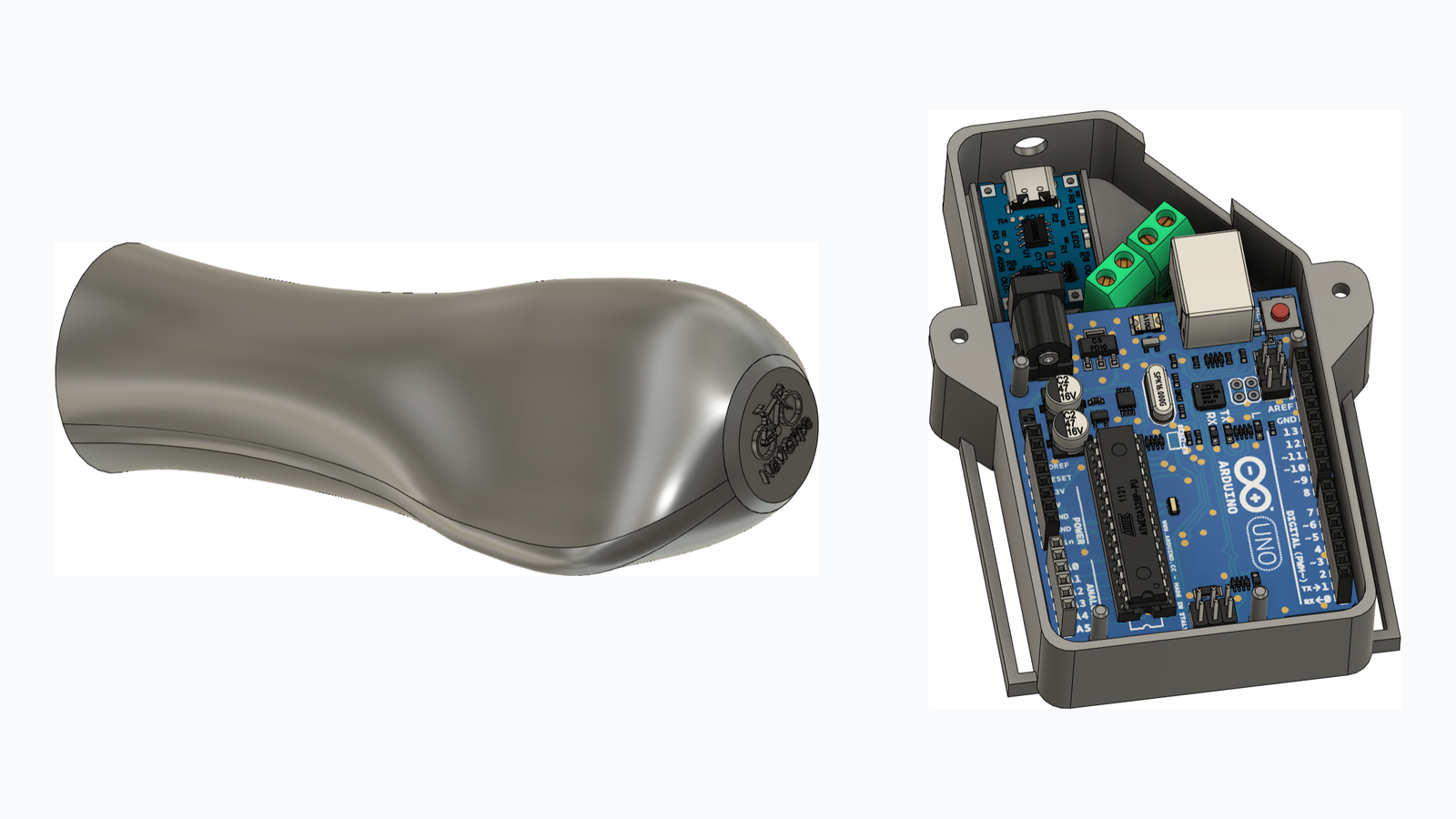
Designed and prototyped vibrating handlebar grips that provide turn-by-turn haptic navigation for cyclists, improving safety by keeping eyes on the road.
Programmed and controlled a 3-DOF robot arm to autonomously detect, pick up, sort, and stack colored poker chips from a moving conveyor belt using computer vision and Stateflow.
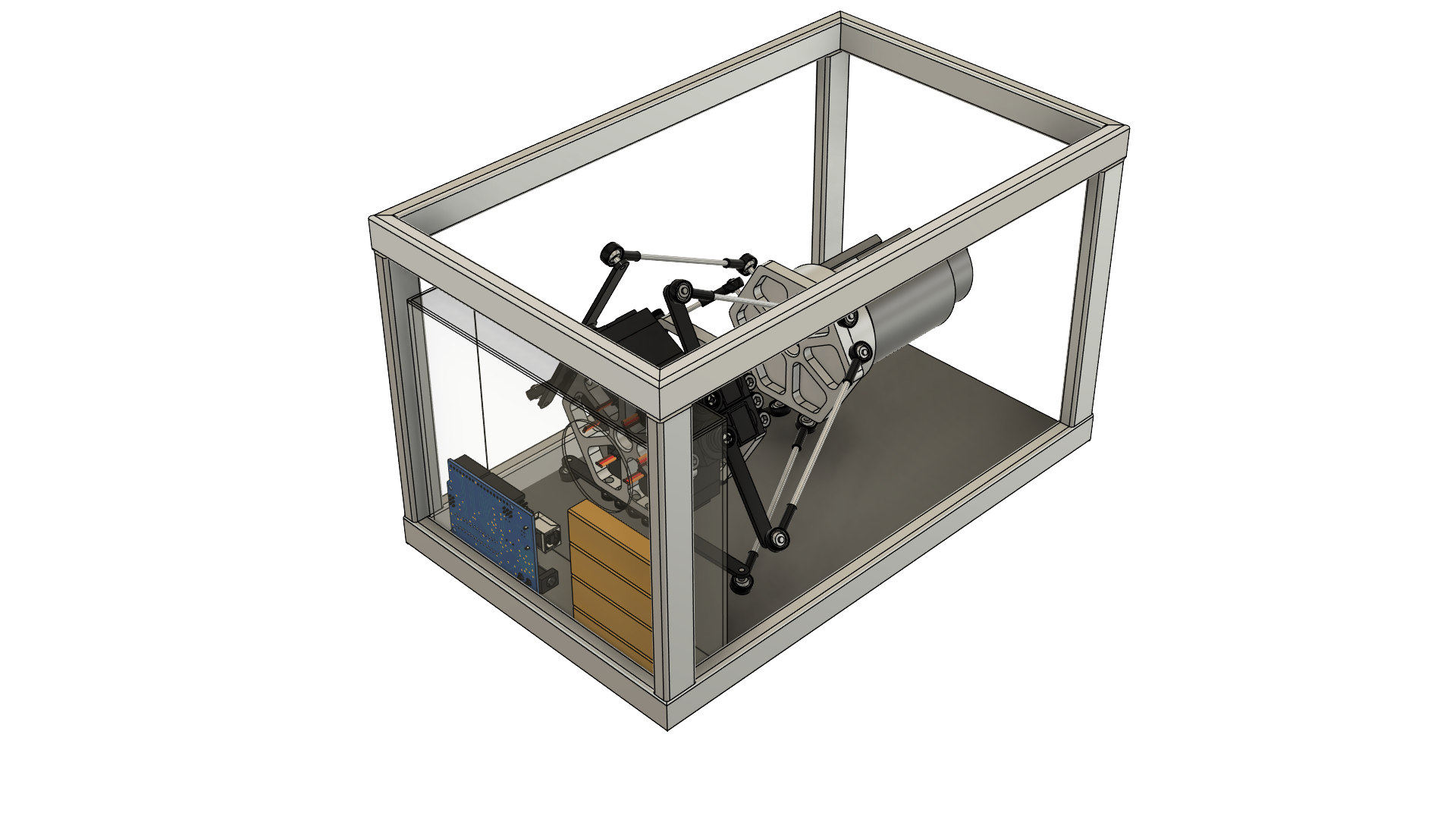
Mechatronic design of an automatic billiard cue: a 6-DOF Stewart platform aiming an electromagnetic linear actuator that strikes the cue ball, designed end-to-end from RPC list through PID control to power budget.
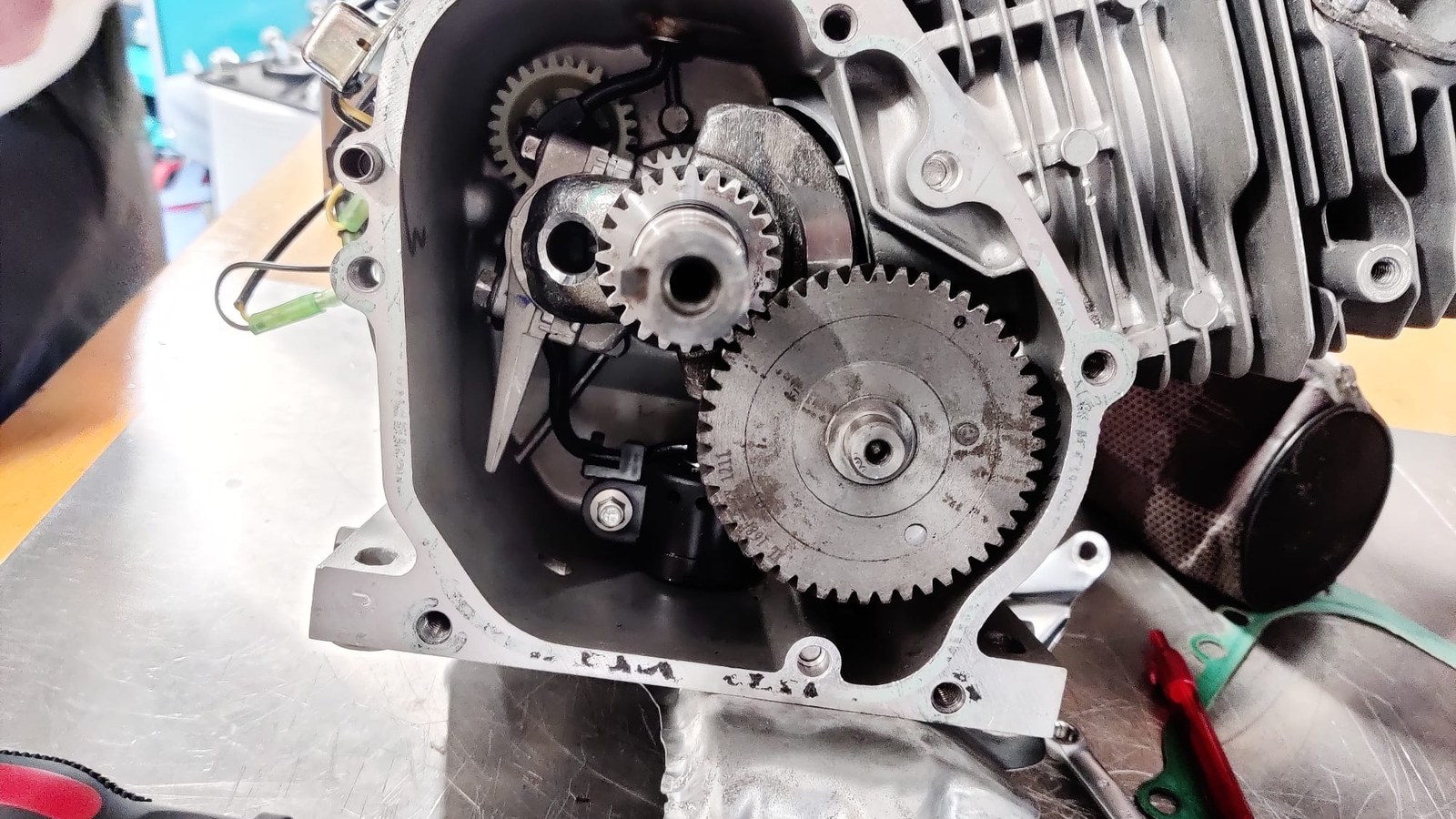
Investigated the efficiency and sustainability of ethanol-blended gasoline (E0–E15) in a Honda GX200 engine through physical experimentation and MATLAB thermodynamic modeling.
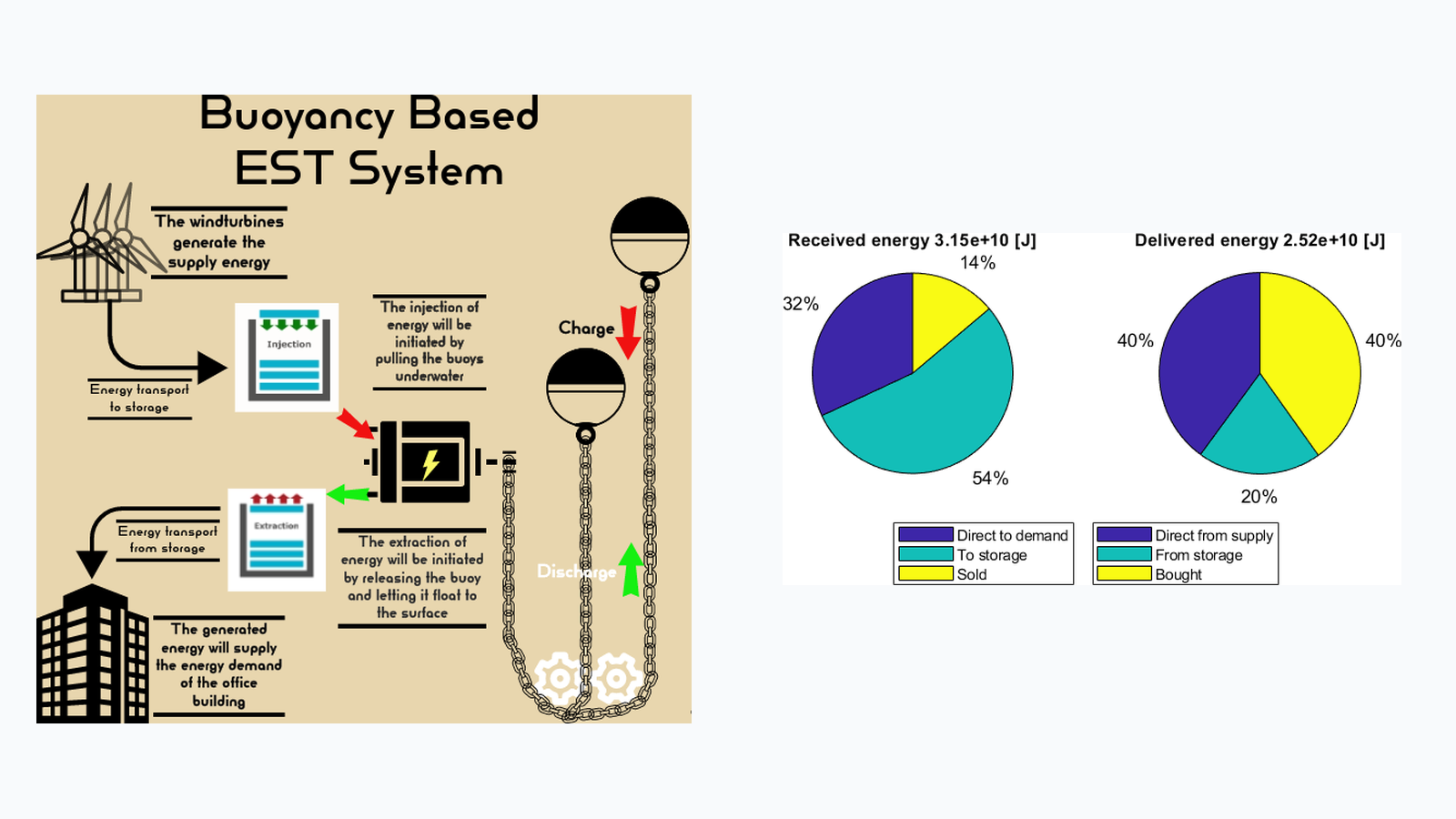
Modeled and simulated a gravity-buoy energy storage system in MATLAB/Simulink to store excess wind energy by submerging buoyant spheres underwater.
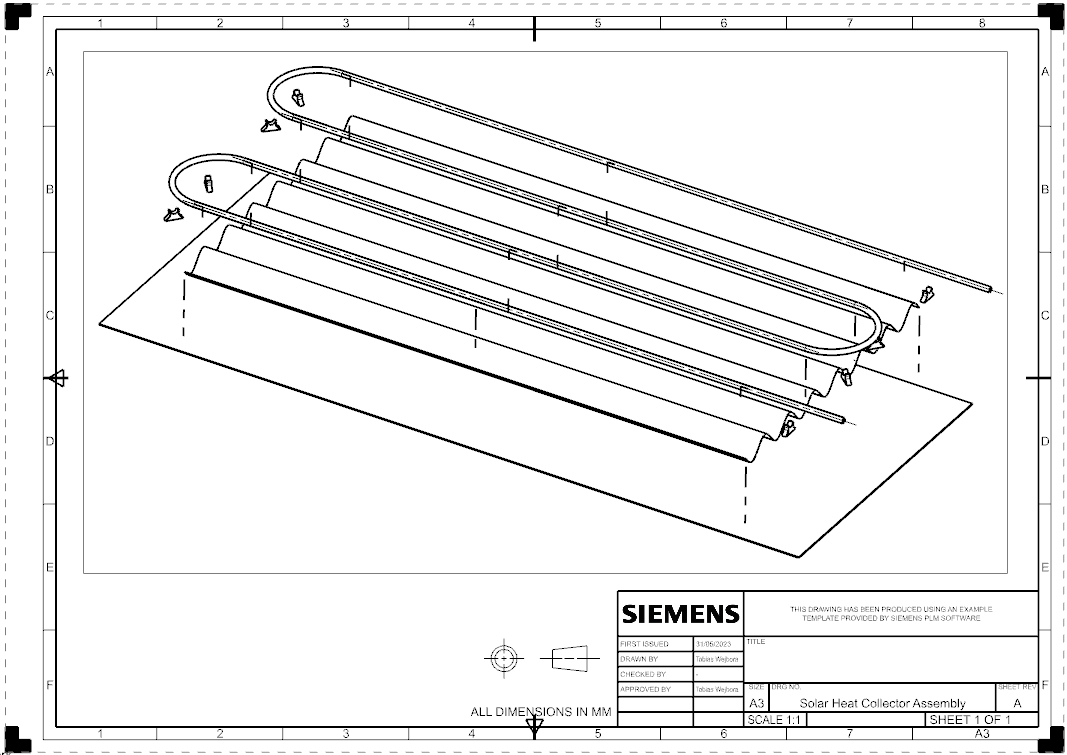
Designed and built a solar heat system following Cradle-to-Cradle principles, with a MATLAB numerical model for thermal performance prediction and parameter optimization.
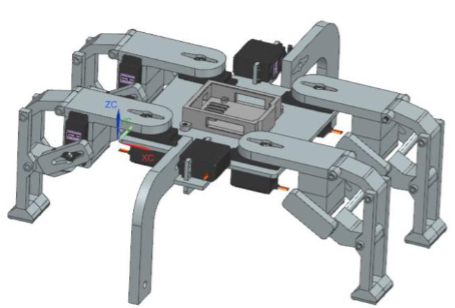
Designed, 3D-printed, and programmed a multi-legged walking robot with inverse kinematics to autonomously navigate a parkour course with slopes and gaps.
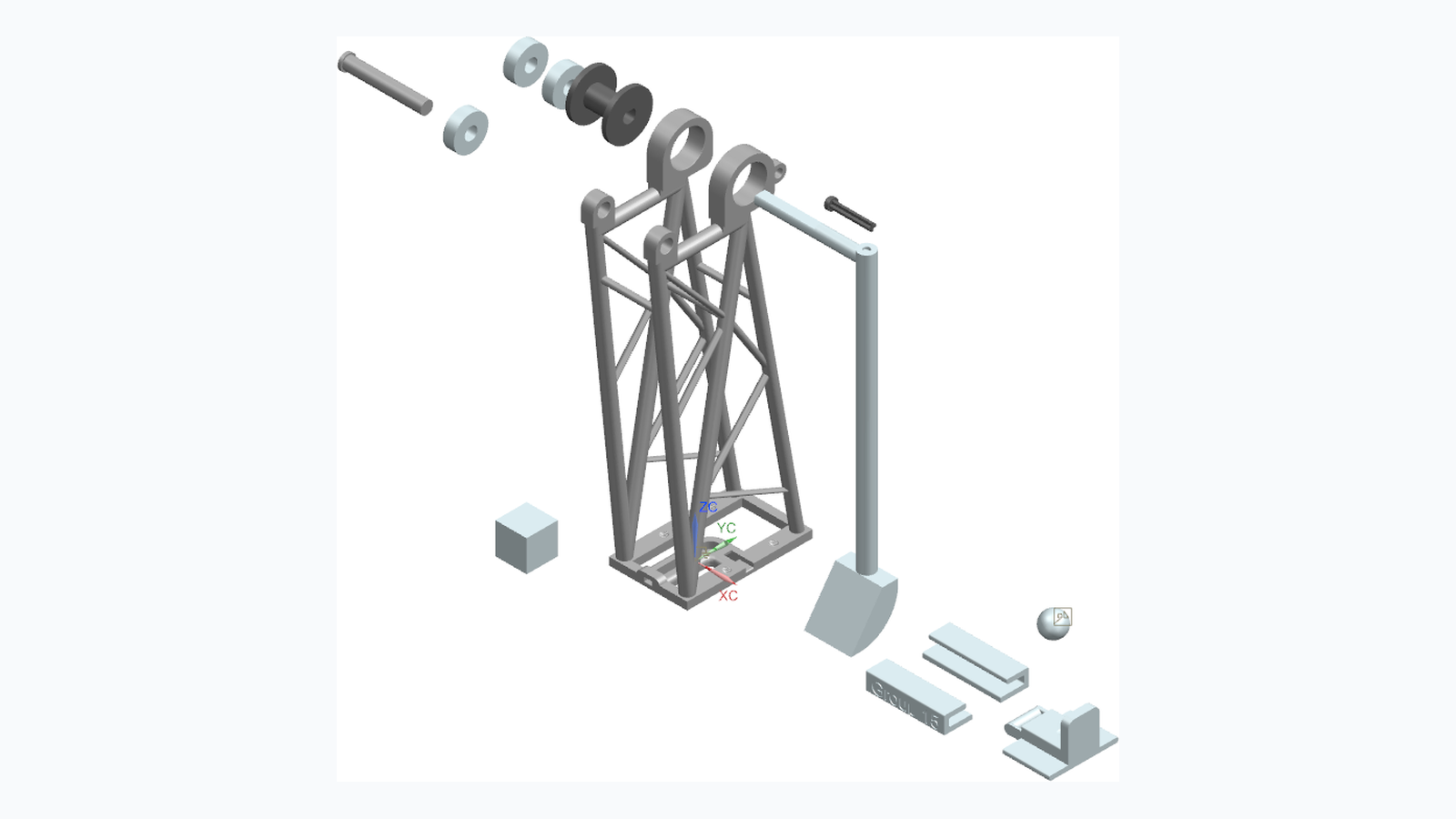
Designed and 3D-printed (SLS) a gravity-powered launching mechanism to launch a projectile as far as possible, following a full 7-phase design methodology.
Represented the Cayman Islands at the FIRST Global Challenge 2021, designing and building a competition robot as part of a 7-member national team.