Overview
In this Challenge-Based Learning project (4GA40, Q3 2022-2023), our team of 5 designed, manufactured, and programmed a multiped walking robot capable of navigating a parkour course. The course included a 20-30 degree slope, sharp turns, and gaps that the robot had to traverse as quickly as possible.
Design Process
Concept Generation
We explored multiple locomotion concepts through an RPC (References-Preferences-Constraints) analysis:
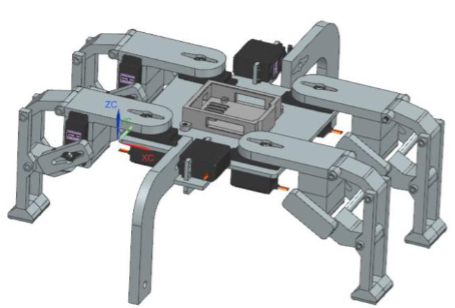
- Spider-type — 6+ legs, stable but complex
- Dog-type — 4 legs, faster but less stable
- Hybrid — combined elements from multiple concepts
The final design was a hybrid between two concepts, optimizing for stability on inclines while minimizing the number of actuators.
CAD and Manufacturing
All custom parts were designed in Siemens NX and manufactured using:
- SLS 3D printing (Nylon 12) for structural components
- Laser cutting for flat components
Kinematics and Control
Denavit-Hartenberg Modeling
Each leg was modeled using DH parameters to define the kinematic chain from the body frame to the foot:
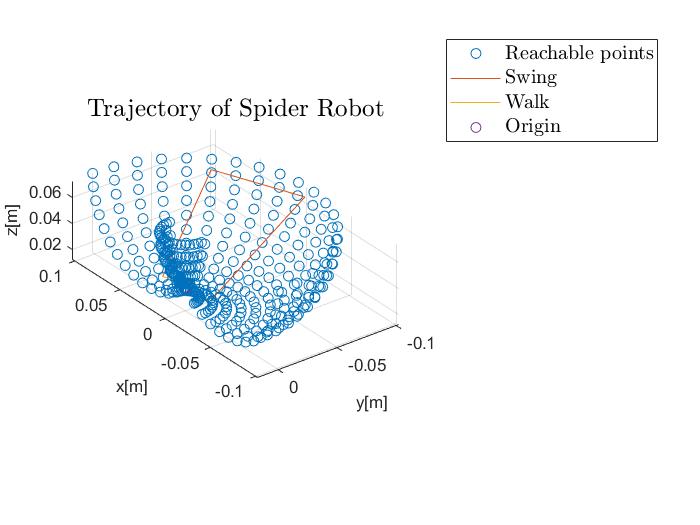
Inverse Kinematics
Given a desired foot position, the inverse kinematics solver computed the required servo angles. This was implemented in MATLAB and used for:
- Gait planning — creep gait for stability (only one leg moves at a time)
- Trajectory generation — smooth foot paths for slope climbing
- Workspace analysis — ensuring reachable positions for all terrain features
Servo Control
The leg servos were driven by MATLAB-generated trajectories, with the gait sequence coordinated to maintain the center of gravity within the support polygon at all times.
Testing and Results
The robot was tested on a scaled parkour and iterated based on performance:
- Successfully climbed the 20-degree slope
- Navigated turns by coordinating leg phases
- Gaps required careful trajectory tuning to ensure foot clearance
Results & Discussion
This was my first project combining CAD design, manufacturing, kinematics theory, and embedded control into a single system. The challenge of translating textbook DH parameters into a physical walking robot taught me how theoretical models break down in practice — friction, servo backlash, and weight distribution all matter more than expected.
Technologies Used
MATLAB (kinematics, trajectory planning), Siemens NX (CAD), SLS 3D printing (Nylon 12), laser cutting, servo motors