Overview
In the Mechatronic Design course (4CC10) at TU Eindhoven, our team of five designed a smart, versatile, automatic billiard cue — a stand-alone device that positions itself over a billiard table, aims, and shoots the cue ball. The use case is an artificial training opponent: a substitute player capable of reproducing high-performance shots (spin, reverse, pique) so that a single user can practice against the device.
The course covers the full mechatronic stack — kinematics, dynamics, feedback control, electro-mechanical actuation, sensing, magnetic and power electronics, system engineering, and budget-based design — so the project deliberately spans all of those layers in one design.
Requirements (RPC list)
The Requirements / Preferences / Constraints list framed every downstream decision:
- Actuation — linear actuator for shooting, decoupled from positioning
- Size & mass — shoe-box envelope (330 × 200 × 200 mm), under 10 kg total
- Shot versatility — pique shot at 30° cue tilt; eccentric shots with ±10 mm range and ±2 mm accuracy
- UI — simple feedback notifying the user when a requested shot is impossible
- Power — battery-powered, must last a full game (≈ 1 hour)
The accuracy constraint, traced through the kinematic chain, demands a 0.6 mm tracking error at the cue tip — which sets the bar for both the linear actuator and the platform servo loops.
Conceptual Design
We sketched five concept architectures (A–E) covering the design space from cart-on-wheels with stacked lead screws to fully parallel kinematics:
- Design A — single linear actuator does both shooting and X-translation (function combination)
- Design B — linear actuator decoupled from X-translation, but stacked with rotational motor (tall)
- Design C — cart on wheels, limits height
- Design D — upside-down lead screw, also limits height
- Design E — Stewart platform: 6 servos drive 6 DOFs through a parallel rod linkage
A weighted decision matrix scored each concept against shooting power, shot versatility, size, stability, mass, separate-motor-per-DOF, and visual appeal. Concept E (Stewart platform) won decisively — it is the only architecture that gives every DOF its own actuator (no function combination), is the most compact, and meets the 10 kg mass cap.
Mechanical Architecture
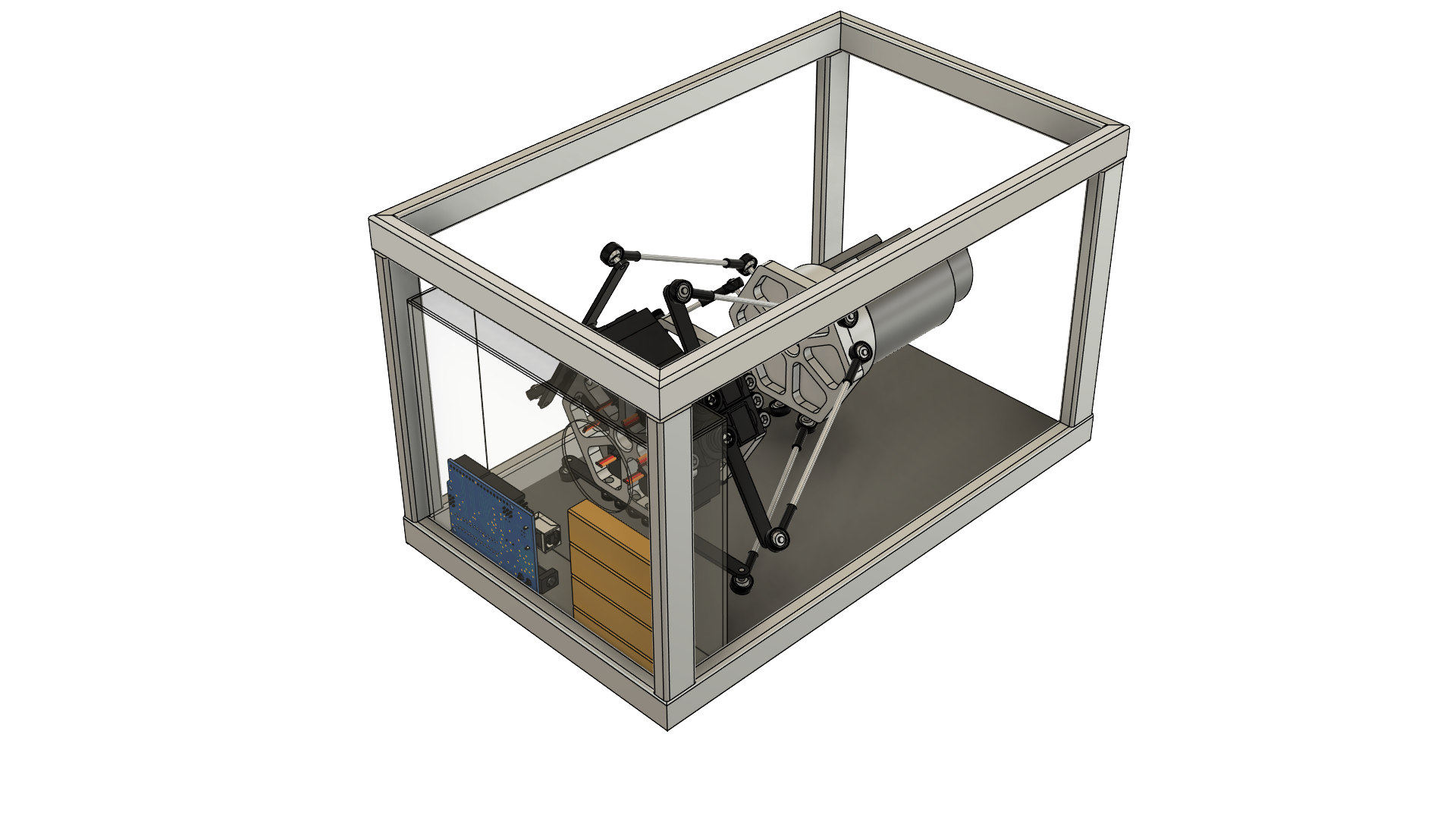
The mechanism splits into three subsystems:
- Frame — 300 × 220 × 220 mm cage from 20 × 10 × 2 mm rectangular aluminium profile (2.7 kg)
- Stewart platform — six high-torque servos at the base, 50 mm steel crank arms, 3 mm steel rods with rod-end bearings, aluminium upper platform (2.1 kg). Neutral platform height: 115 mm
- Linear actuator carriage — electromagnetic actuator mounted on the upper platform, fires the cue (1.6 kg)
Plus 1.5 kg of acrylic-housed electronics, totalling 7.9 kg — comfortably under the 10 kg constraint.
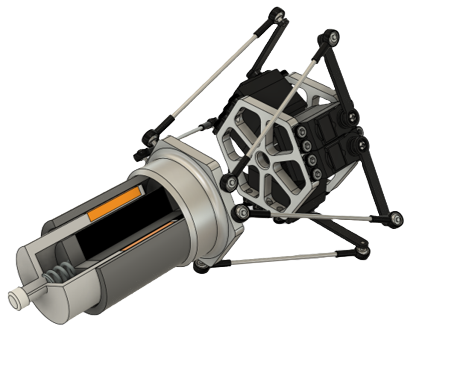
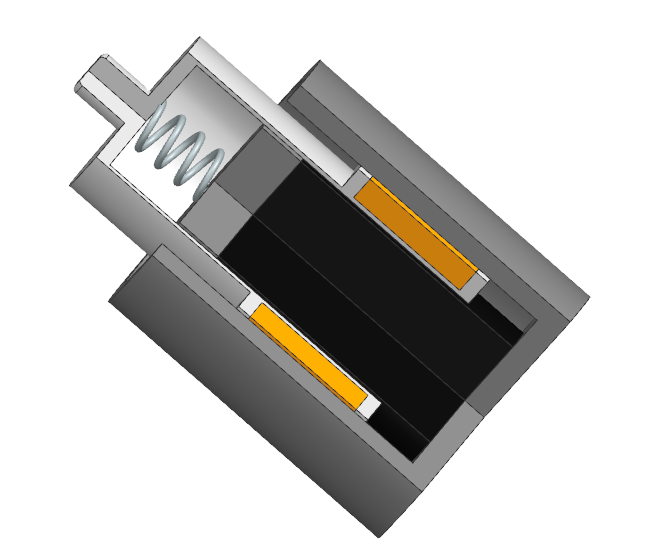
Linear actuator
A custom moving-coil voice-coil-style actuator strikes the ball: a copper coil rides inside a steel stator (low-reluctance return path) past a permanent magnet. The Lorentz force drives the cue forward; a return spring restores it. Designed for:
- Stroke — 50 mm
- Peak force — 39.82 N (sized for a 3.2–4.5 m/s "power shot" velocity referenced from professional play data)
- Inertial matching between coil mass and cue inertia, so the actuator is force-limited rather than inertia-limited
Control Architecture
The plant was modelled as a mass-spring-damper ( N/m, kg, Ns/m) and stabilised with a PID + feedforward controller:
A 100 rad/s low-pass filter smooths the noisy reference. With a 0.1 m sine-wave reference and white-noise disturbance injection:
- Phase margin — 68.8°
- Max tracking error — 0.57 mm (under the 0.6 mm budget)
Margins are sufficient — the system is stable with comfortable headroom for the unmodelled cable and rod compliance.
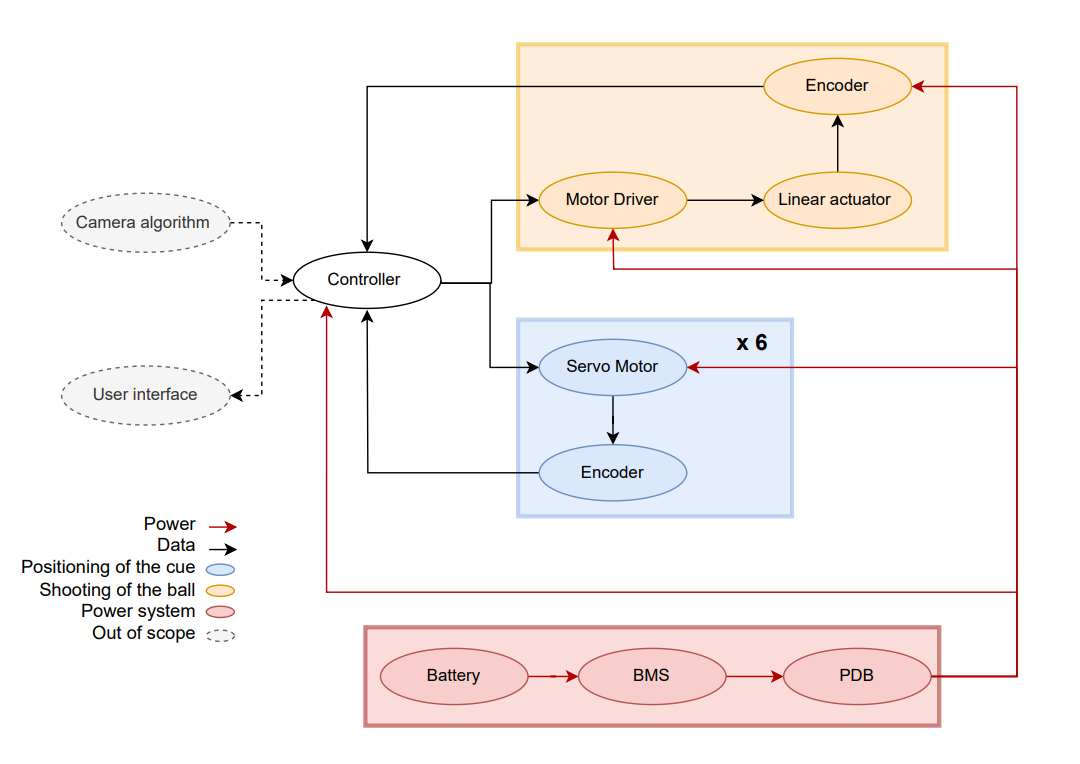
The architecture diagram lays out the three colour-coded subsystems:
- Yellow — shooting loop — controller → motor driver → linear actuator → encoder feedback
- Blue — positioning loop — controller → 6× servo motors with internal encoders (one per Stewart leg)
- Red — power chain — battery → BMS → power distribution board
Power Budget
Total electrical load (with buffer for wiring losses): 250 W. With a Li-Po cut-off at 21 V, mean current is ≈ 11.1 A. A combined 14 Ah battery pack therefore yields ≈ 60 minutes of continuous play — exactly one full game, as required.
Risk Analysis
The dominant risks scored on impact × likelihood × detectability:
- Steel rod failure — high impact / medium likelihood → mitigated by FEM stress checks and material upgrade
- Servo failure — high impact / low likelihood → mitigated by spec-margin on holding torque
- Linear-actuator overheating — addressed via a discrete overheat-warning circuit on the power amp transistors
Results & Discussion
This was my first project that demanded every mechatronic discipline at once: kinematics for the platform, dynamics for the cue, magnetic design for the actuator, control design for both loops, and electronics + power budgeting around them. The Stewart platform's parallel kinematics meant that the inverse-kinematics solver and the controller had to be co-designed — there is no clean separation between "mechanism" and "controller" once the legs are coupled.
The most useful design move was decoupling shooting from positioning at the architecture stage. Concept A (combined actuator) was deceptively elegant on paper but would have made spin and reverse shots impossible to aim accurately — a good reminder that function combination is cheap in CAD and expensive in control.
Presentation
Download Project Presentation (PPTX)Technologies Used
Siemens NX (CAD), Stewart-platform inverse kinematics, PID + feedforward control, MATLAB/Simulink (control simulation), magnetic circuit design (voice-coil actuator), power-budget analysis, Li-Po + BMS battery system design